Machine assessment
Contents
- Basic machine description
- Machine control description
- Machine specifications
- Hazards
- Required performance levels
Introduction
This document is based on ISO 12100, ISO 10218-1, ISO 10218-2, ISO 13849-1 and ISO 13482
Safety measures are taken using the procedure as displayed in the figure below, which is taken from ISO 13482.
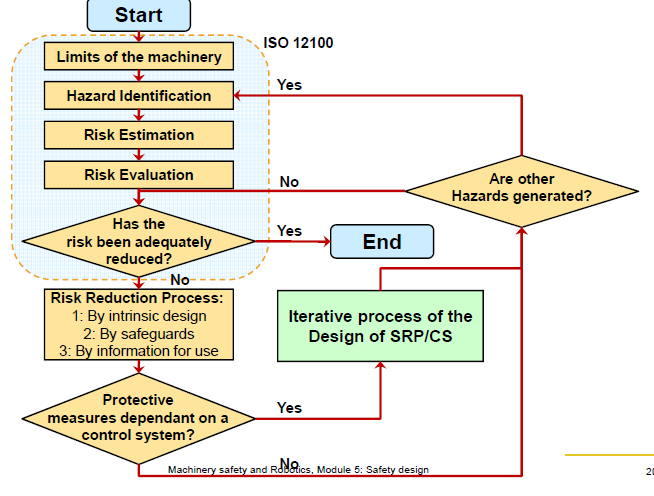
Safety measures are evaluated according to the image below, which is also taken from ISO 13482.

Basic machine description
Intended use
The robot is intended to be used in a group of similar robots to cooperate with. After deployment, all machines will autonomously explore an environment in order to build a map of this environment. The map will be exported and regularly updated to any monitoring device running Linux 14.04 with ROS Indigo installed.
Machine components
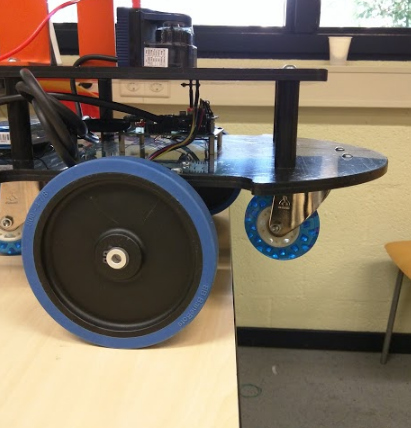
The machine consists of a metal base. It is made portable by four wheels, two of which motorised. An additional frame is attached to the machine to support a 3D vision camera. A LIDAR sensor is attached to the base of the machine. The machine also consists of an ECU, an accu pack and a charger.

Figure 1: Rosbee robot with laser- and depth sensor
Machine control system description
The microcontroller has two motor controllers sending -10V to +10V power supply to the motors.

Figure 2: Rosbee microcontroller
Machine specifications
Machine limits
| |
Machine Name/Type
|
Rosbee
|
Intended Environment:
|
Indoors, University corridors
Restrictions:
|
Required Training Level:
|
Basic Training
|
Operated by:
|
Operator, Maintenance Technician
|
Intended Use:
|
Exploration and surveillance
|
Machine Lifetime:
|
5 years
|
Machine Dimensions:
|
400mm x 350mm x 400mm (l x w x h)
|
Machine Environment:
|
Indoors, dry, clean, non-explosive, non-flammable.
|
Operational and maintenance information
| |
Operational information
| |
No. of Operators:
|
1
|
Maintenance information
| |
Maintained by:
|
Operator, Maintenance Technician
|
Maintenance Frequency:
|
Daily
|
Cleaning:
|
Operator
|
Jamming Repair:
|
Operator
|
Power sources
| |
Main Feed, Elec. Supply:
|
11.1V DC (+-10%)
|
Pneumatic Supply:
|
Not Applicable
|
Hydraulic Supply:
|
Not Applicable
|
Hazards
The Evaluation methodology is based on Pilz criteria and experience, an evaluation of the factors, Degree of Possible Harm (DPH), Probability of Occurrence of a Hazardous Event (PO), Possibility of Avoidance
(PA) and Frequency and/or duration of Exposure (FE), and has been performed on the risk related with
each hazard. A Pilz Hazard Rating has then been calculated from the following formula:
PHR = DPH x PO x PA x FE
Degree of Possible Harm (DPH)
0.25 Scratch / Bruise
0.5 Laceration / cut / mild ill health effect/ minor burns
3 Fracture minor bone – fingers, toes
5 Fracture major bone – hand, arm, leg
8 Loss of 1 or 2 fingers/ toes or major burns
11 Leg / hand amputation, partial loss of hearing or eye
15 Amputation of 2 legs/hands, total loss of hearing/sight in both ears/eyes
25 Critical injuries or permanent illness/condition/injury
40 Single Fatality
65 Catastrophe
Possibility of Occurrence of Hazard Event (PO)
0.05 Almost impossible
1.25 Unlikely
2.5 Possible
4 Probable
6 Certain
Possibility of Avoidance (PA)
0.75 Possible
2.5 Possible under certain circumstances
5 Not Possible
Frequency of Exposure (FE)
0.5 Annually
1 Monthly
2 Weekly
3 Daily
4 Hourly
5 Constantly
The maximum and minimum numerical values that could be assigned to each factor for every hazard are
shown in the following table.
PHR
|
Risk
|
Comment
| |||||
1-10
|
Negligible Risk
|
Presents practically no risk to health and safety, no further risk reduction measures are required.
| |||||
11-20
|
Very Low Risk
|
Presents very little risk to health and safety, no significant risk reduction measures are required, may necessitate the use of personal protective equipment and/or training.
| |||||
21-45
|
Low Risk
|
Risk to health and safety is present, but low. Risk reduction measures must be considered.
| |||||
46-160
|
Significant Risk
|
The risk associated with the hazard is substantial enough to require risk reduction measures. These measures should be implemented at the next suitable opportunity.
| |||||
161-500
|
High Risk
|
Potentially dangerous hazard, which requires risk reduction measures to be implemented urgently.
| |||||
501+
|
Very high Risk
|
Risk reduction measures should be implemented
immediately, corporate management should be notified.
| |||||
Hazard Identification
|
Hazard No.
|
1.1 a
| |||
Title
|
Tripping over an immobile robot
| 
| |||
Location
|
Robot
| ||||
Target
|
Feet, shins
| ||||
Activity
|
Normal operation
| ||||
Task
|
Navigating
| ||||
Sub Task
|
Mapping
| ||||
Hazard Type
|
Hazard with the consequence of
| ||||
Sub Type
|
Tripping, falling
| ||||
Description
|
The Rosbee is standing somewhere in an environment and is overlooked by a person. The person trips over the robot.
| ||||
References:
| |||||
Risk Estimation and Evaluation
| |||||
Degree of Possible Harm:
|
5
|
Possibility of Avoidance:
|
0.75
| ||
Probability of Occurance of a Hazardous Event:
|
1.25
|
Frequency And/or Duration of Exposure:
|
5
| ||
Pilz Hazard Rating (PHR):
|
23.4375
|
Summary Level:
|
Low Risk
| ||
Risk Reduction
|
Reference
| ||||
Use bright coloured markers on the robot + a bright coloured flag.
The robot can make a continuous warning sound for surrounders.
| |||||
Risk Estimation and Evaluation
| |||||
Degree of Possible Harm:
|
5
|
Possibility of Avoidance:
|
0.75
| ||
Probability of Occurance of a Hazardous Event:
|
0.05
|
Frequency And/or Duration of Exposure:
|
5
| ||
Pilz Hazard Rating (PHR):
|
0.9375
|
Summary Level:
|
Negligible Risk
| ||
Hazard Identification
|
Hazard No.
|
1.1 b
| |||
Title
|
Tripping over a moving robot
|
| |||
Location
|
Robot
| ||||
Target
|
Feet, shins
| ||||
Activity
|
Normal operation
| ||||
Task
|
Navigating
| ||||
Sub Task
|
Mapping
| ||||
Hazard Type
|
Mechanical Hazard with the consequence of
| ||||
Sub Type
|
Tripping, falling
| ||||
Description
|
The Rosbee navigates through an environment and is overlooked by a person. The person trips over the robot.
| ||||
References:
| |||||
Risk Estimation and Evaluation
| |||||
Degree of Possible Harm:
|
5
|
Possibility of Avoidance:
|
0.75
| ||
Probability of Occurance of a Hazardous Event:
|
2.5
|
Frequency And/or Duration of Exposure:
|
5
| ||
Pilz Hazard Rating (PHR):
|
46.875
|
Summary Level:
|
Significant Risk
| ||
Risk Reduction
|
Reference
| ||||
Use bright coloured markers on the robot + a bright coloured flag. Add collision avoidance software.
The robot can make a continuous warning sound for surrounders.
| |||||
Risk Estimation and Evaluation
| |||||
Degree of Possible Harm:
|
5
|
Possibility of Avoidance:
|
0.75
| ||
Probability of Occurance of a Hazardous Event:
|
1.25
|
Frequency And/or Duration of Exposure:
|
5
| ||
Pilz Hazard Rating (PHR):
|
23.4375
|
Summary Level:
|
Low Risk
| ||
Hazard Identification
|
Hazard No.
|
1.2
| |||
Title
|
Falling
| 
| |||
Location
|
E.g. staircase or other sudden altitude drop
| ||||
Target
|
Human
| ||||
Activity
|
Normal operation
| ||||
Task
|
Navigating
| ||||
Sub Task
|
Mapping
| ||||
Hazard Type
|
Mechanical Hazard with the consequence of
| ||||
Sub Type
|
Impact, crushing
| ||||
Description
|
The Rosbee navigates through an environment, overlooks an altitude drop (e.g. staircase) and falls/accelerates
| ||||
References:
| |||||
Risk Estimation and Evaluation
| |||||
Degree of Possible Harm:
|
40
|
Possibility of Avoidance:
|
0.75
| ||
Probability of Occurance of a Hazardous Event:
|
1.25
|
Frequency And/or Duration of Exposure:
|
1
| ||
Pilz Hazard Rating (PHR):
|
37.5
|
Summary Level:
|
Low Risk
| ||
Risk Reduction
|
Reference
| ||||
Use robot only in environments without a possibility of altitude drops (e.g. staircase). Or place fences around, or doors towards staircase.
| |||||
Risk Estimation and Evaluation
| |||||
Degree of Possible Harm:
|
40
|
Possibility of Avoidance:
|
0.75
| ||
Probability of Occurance of a Hazardous Event:
|
0.05
|
Frequency And/or Duration of Exposure:
|
1
| ||
Pilz Hazard Rating (PHR):
|
1.5
|
Summary Level:
|
Negligible Risk
| ||
Hazard Identification
|
Hazard No.
|
1.3
| |||
Title
|
Voltage Adapter
| 
| |||
Location
|
Battery
| ||||
Target
|
Robot, Environment
| ||||
Activity
|
Charging Battery
| ||||
Task
|
Charging
| ||||
Sub Task
|
-
| ||||
Hazard Type
|
Thermal Hazard with the consequence of
| ||||
Sub Type
|
Burn, fire, explosion, inhalation of toxic fume.
| ||||
Description
|
Connect the wrong voltage adapter to the battery in order to charge it.
| ||||
References:
| |||||
Risk Estimation and Evaluation
| |||||
Degree of Possible Harm:
|
0.5
|
Possibility of Avoidance:
|
0.75
| ||
Probability of Occurance of a Hazardous Event:
|
1.25
|
Frequency And/or Duration of Exposure:
|
4
| ||
Pilz Hazard Rating (PHR):
|
1.875
|
Summary Level:
|
Negligible Risk
| ||
Risk Reduction
|
Reference
| ||||
Not necessary
| |||||
Hazard Identification
|
Hazard No.
|
1.4
| |||
Title
|
Sharp Edges
| 
| |||
Location
|
Top of the robot
| ||||
Target
|
A human body part
| ||||
Activity
|
Normal operation
| ||||
Task
|
Any
| ||||
Sub Task
|
-
| ||||
Hazard Type
|
Mechanical Hazard with the consequence of
| ||||
Sub Type
|
Cutting
| ||||
Description
|
If someone bumps the robot or grabs the robot in the wrong place the sharp edge can cut the person.
| ||||
References:
| |||||
Risk Estimation and Evaluation
| |||||
Degree of Possible Harm:
|
0.5
|
Possibility of Avoidance:
|
0.75
| ||
Probability of Occurance of a Hazardous Event:
|
1.25
|
Frequency And/or Duration of Exposure:
|
4
| ||
Pilz Hazard Rating (PHR):
|
1.875
|
Summary Level:
|
Negligible Risk
| ||
Risk Reduction
|
Reference
| ||||
Not necessary
| |||||